My initial role at SETI Institute/NASA Ames was as a member of the VIPER rover science team as an instrument scientist on VIS, the science side of the navigation cameras. In this role I developed software, processes, and pipelines leveraging the Ames Stereo Pipeline, Python, Docker, and existing flight herritage software from JPL called VICAR to produce Panoramas, Mosaics, Stereo and Digital Terrain Models using the Navigation cameras on the mast, the aftcams at the rear of the rover, and the hazcams embedded in each wheel well. I also worked with other engineers on the team to extract camera extrinsics from telemetry and write python based implementations of the forward kinematics of the mast pan tilt unit, masking out rover hardward from imagery, as well as helping assess V&V image products. Other tasks included working on requirements and processes for the Imaging console operations role. A forthcoming publication will include examples of my contributions to this mission.
VIPER Rover VIS Instrument Scientist
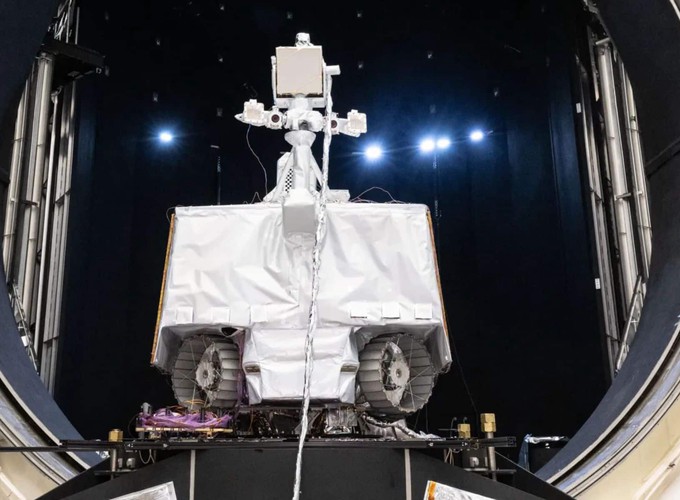
VIPER Rover VIS Instrument Scientist
)
Andrew M. Annex
Senior Science Systems Engineer
My research interests include the applications of deep learning to planetary geology.